publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
-
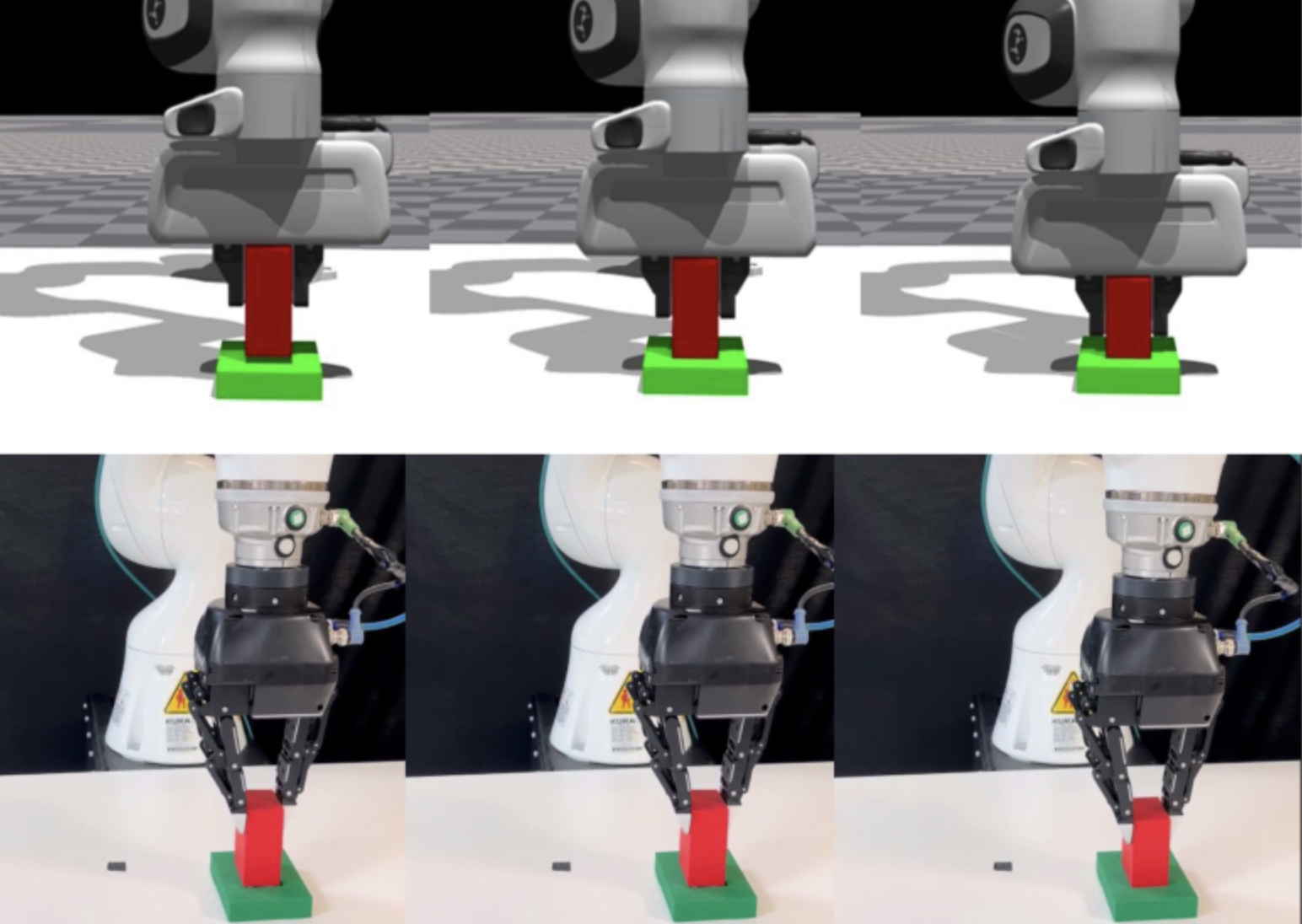 Integrating model-based control and rl for sim2real transfer of tight insertion policiesIEEE International Conference on Robotics and Automation (ICRA), 2025
Integrating model-based control and rl for sim2real transfer of tight insertion policiesIEEE International Conference on Robotics and Automation (ICRA), 2025 -
 Kinodynamic Trajectory Following with STELA: Simultaneous Trajectory Estimation & Local AdaptationRobotics Science and Systems (RSS), 2025
Kinodynamic Trajectory Following with STELA: Simultaneous Trajectory Estimation & Local AdaptationRobotics Science and Systems (RSS), 2025
2024
-
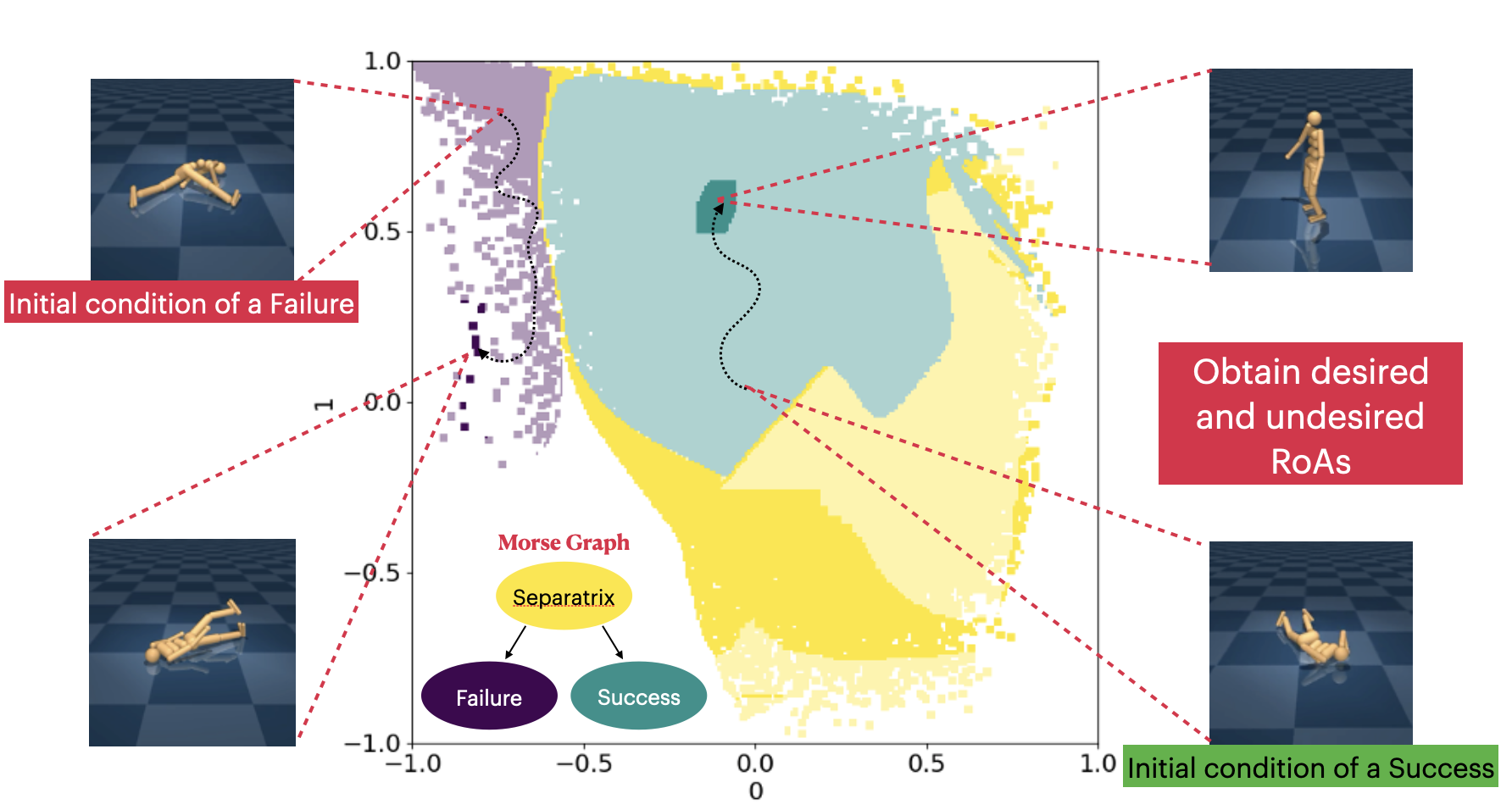 Morals: Analysis of high-dimensional robot controllers via topological tools in a latent spaceIn IEEE International Conference on Robotics and Automation (ICRA), 2024
Morals: Analysis of high-dimensional robot controllers via topological tools in a latent spaceIn IEEE International Conference on Robotics and Automation (ICRA), 2024 - KRAFT: Sampling-Based Kinodynamic Replanning and Feedback Control over Approximate, Identified Models of Vehicular SystemsarXiv preprint arXiv:2409.11522, 2024
2023
- Data-efficient characterization of the global dynamics of robot controllers with confidence guaranteesIn IEEE International Conference on Robotics and Automation (ICRA), 2023
2022
- A survey on the integration of machine learning with sampling-based motion planningFoundations and Trends\textregistered in Robotics, 2022
-
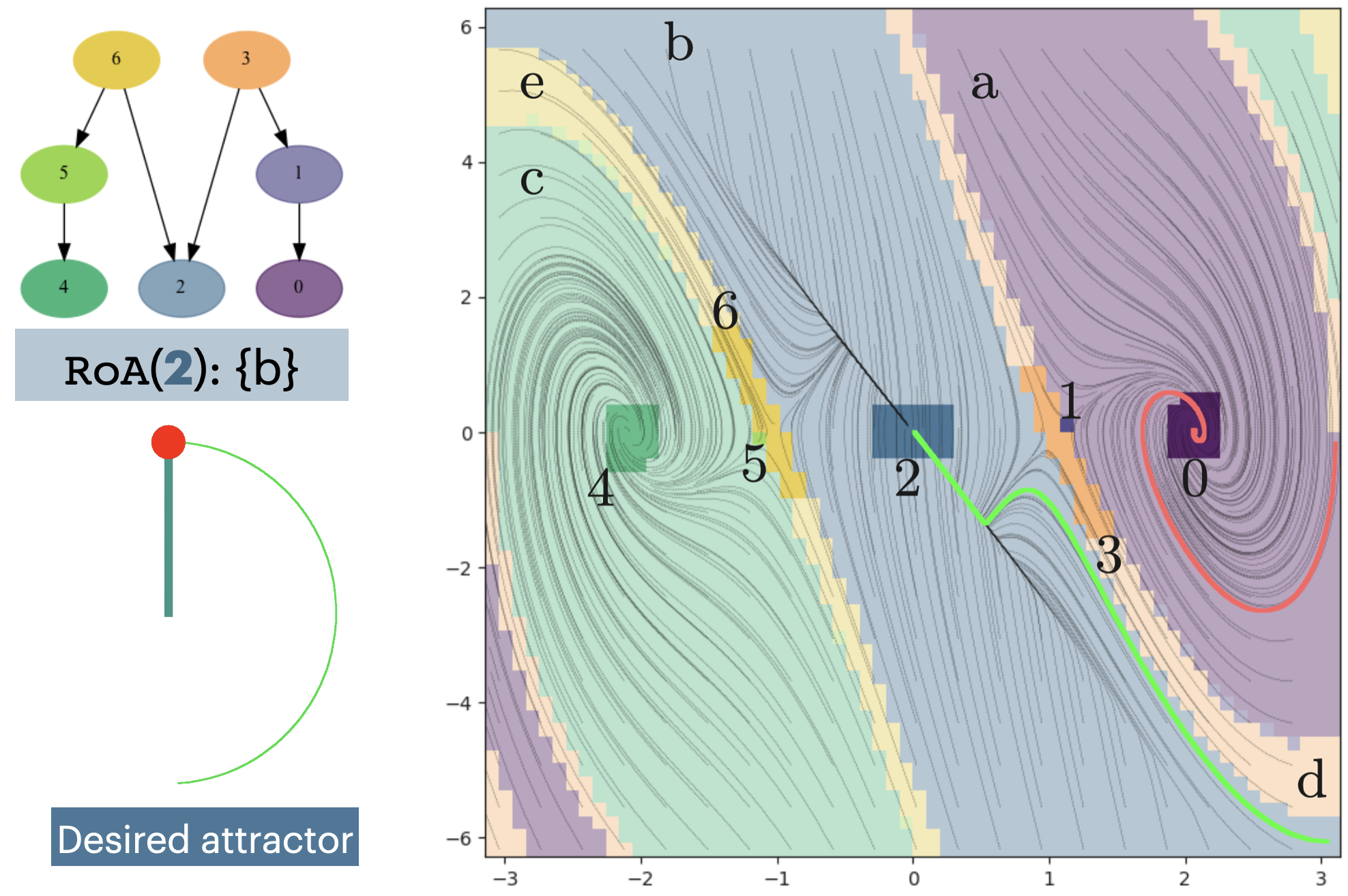 Morse graphs: Topological tools for analyzing the global dynamics of robot controllersIn International Workshop on the Algorithmic Foundations of Robotics, 2022
Morse graphs: Topological tools for analyzing the global dynamics of robot controllersIn International Workshop on the Algorithmic Foundations of Robotics, 2022 - Model identification and control of a low-cost mobile robot with omnidirectional wheels using differentiable physicsIn International Conference on Robotics and Automation (ICRA), 2022
- Terrain-aware learned controllers for sampling-based kinodynamic planning over physically simulated terrainsIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
- Towards benchmarking sampling-based kinodynamic motion planners with ml4kpIn Proc. Workshop Evaluating Motion Plan. Perform., Metrics, Tools, Datasets, Exp. Des. Workshop IROS, 2022
2021
-
 Machine learning for kinodynamic planning (ml4kp)URl: https://github. com/PRX-Kinodynamic/ML4KP, 2021
Machine learning for kinodynamic planning (ml4kp)URl: https://github. com/PRX-Kinodynamic/ML4KP, 2021
2020
-
 Refined analysis of asymptotically-optimal kinodynamic planning in the state-cost spaceIn IEEE International Conference on Robotics and Automation (ICRA), 2020
Refined analysis of asymptotically-optimal kinodynamic planning in the state-cost spaceIn IEEE International Conference on Robotics and Automation (ICRA), 2020